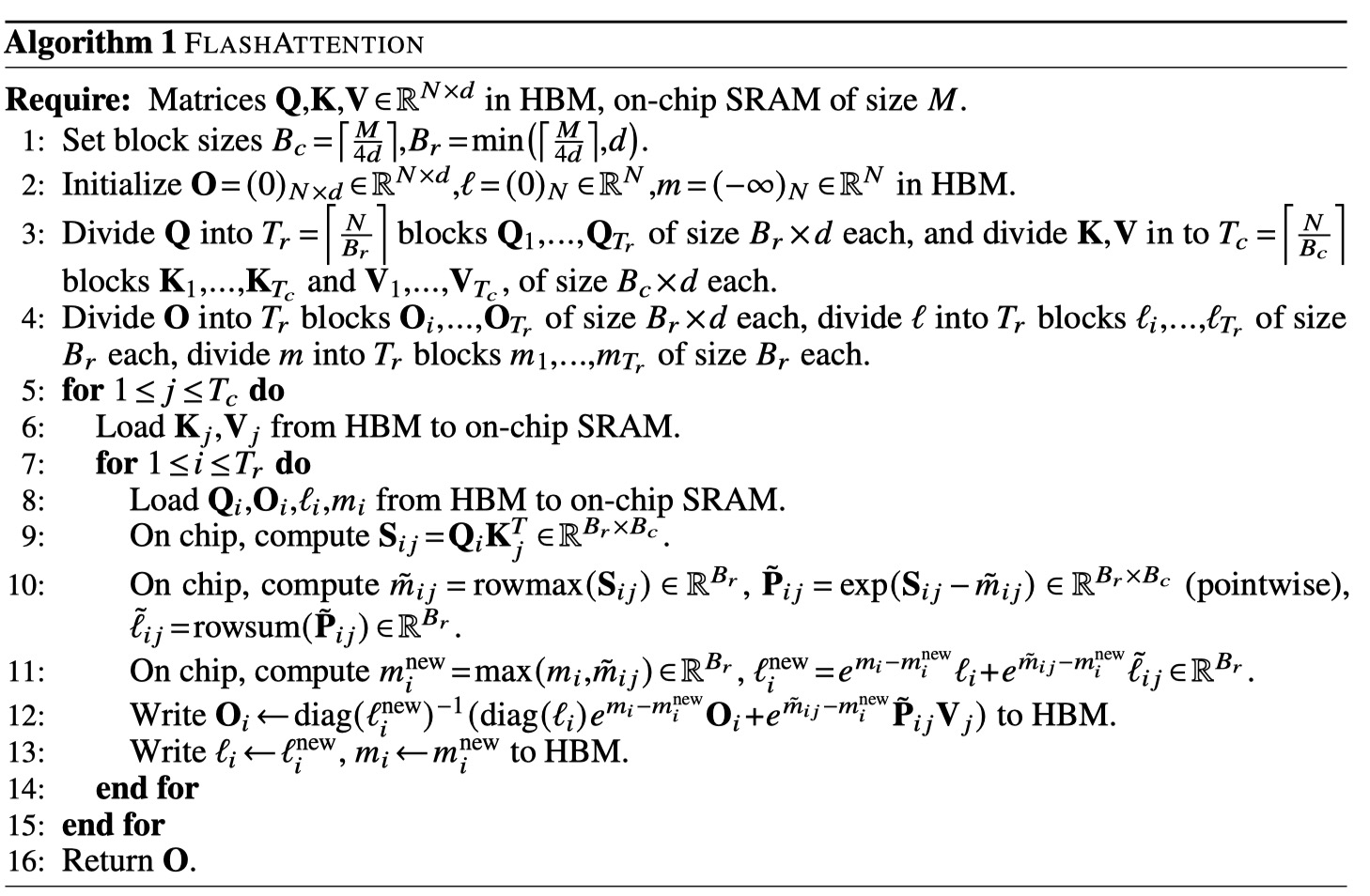
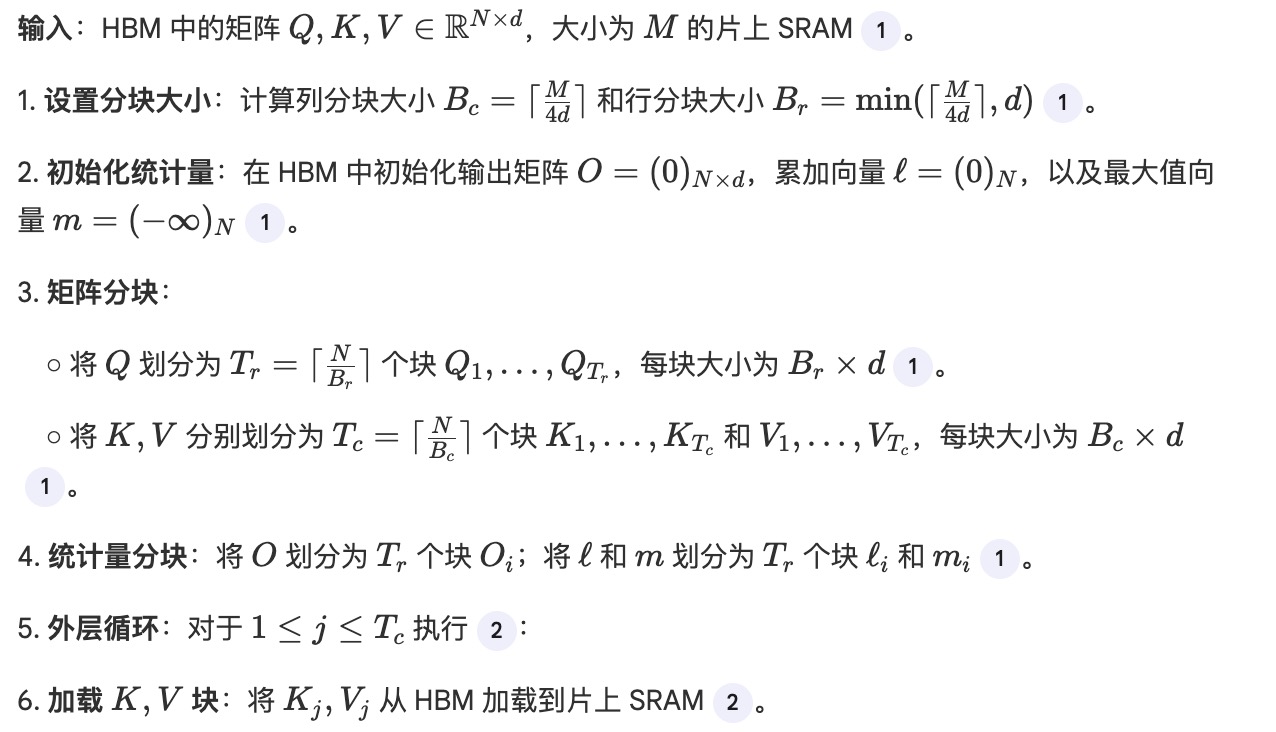
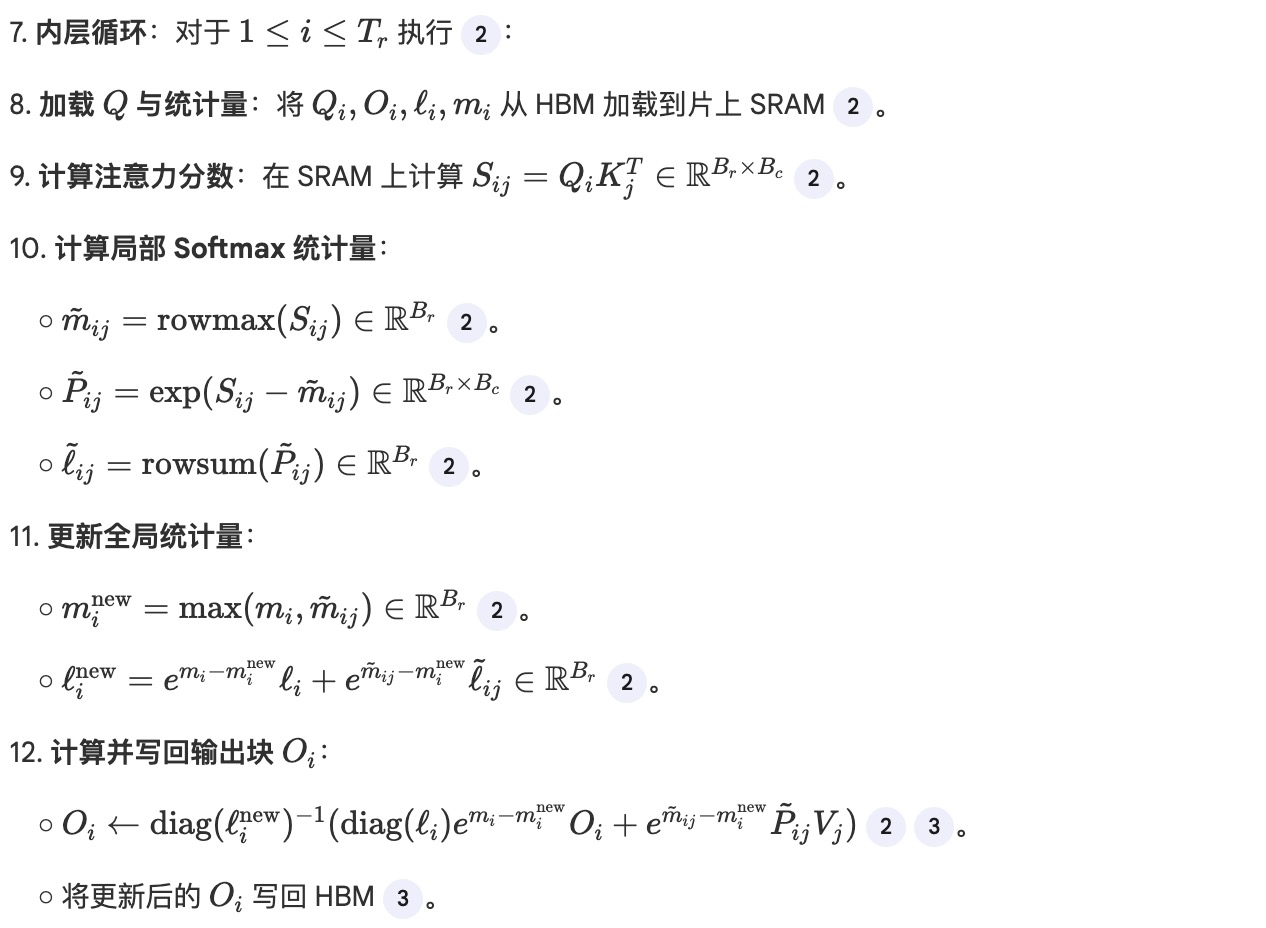
flash attention 干了什么
template <typename Ty, int kBc = 4, int kBr = 4, int kDim = 128>
__global__ void flash_attention_v2_kernel(Ty* Q, Ty* K, Ty* V, Ty* O,
int seqlen, // M
int stride_head, // M*N
Ty smScale) {
int groupSeq = (seqlen + kBc - 1) / kBc;
int groupTx = (kDim + kBc - 1) / kBc;
int groupTy = (kDim + kBr - 1) / kBr;
__shared__ Ty sQ[kBr][kDim];
__shared__ Ty sK[kBc][kDim];
__shared__ Ty sV[kBc][kDim];
__shared__ Ty sO[kBr][kDim];
__shared__ Ty sQK[kBr][kBc];
__shared__ Ty sSafeE[kBr][kBc];
__shared__ Ty sDenom[kBr];
__shared__ Ty sMax[kBr];
int tx = threadIdx.x;
int ty = threadIdx.y;
int base_offset = blockIdx.x * stride_head;
int row = ty + blockIdx.y * blockDim.y;
if (row >= seqlen) {
return;
}
// 显存地址 (内存是线性的)
// 0 1000 2000 3000 ...
// |-----------|-----------|-----------|-----------| ...
// | Batch0 | Batch0 | Batch0 | Batch1 |
// | Head0 | Head1 | Head2 | Head0 |
// | 数据 | 数据 | 数据 | 数据 |
// |-----------|-----------|-----------|-----------|
// ^ ^ ^
// 初始指针Q 偏移后的Q 再偏移...
Q += base_offset; // 见上图 所以需要偏移
K += base_offset;
V += base_offset;
O += base_offset;
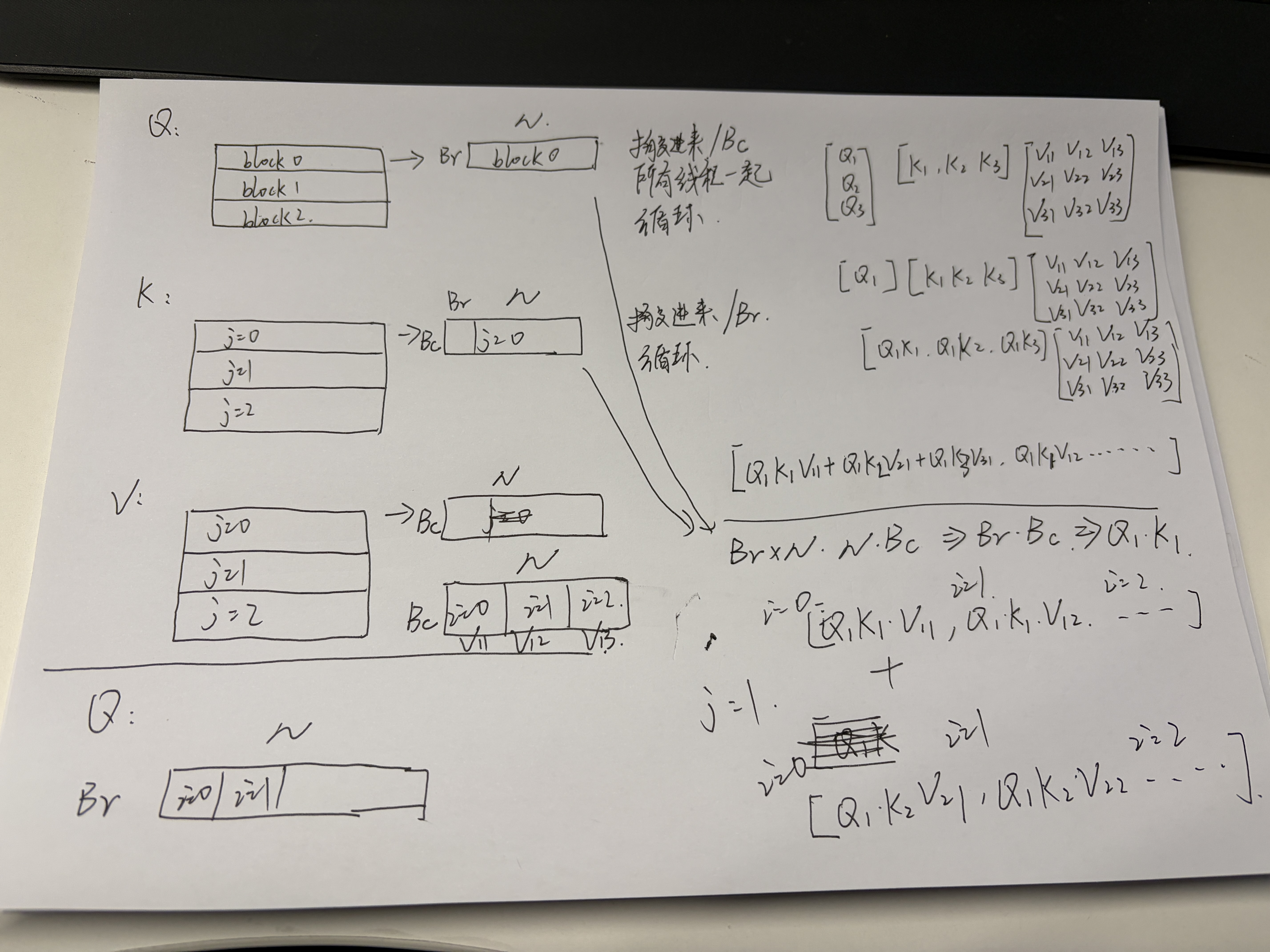
// 每个block都搬移一整行块进来
for (int i = 0; i < groupTx; i++) {
sQ[ty][i * kBc + tx] = Q[row * kDim + i * kBc + tx]; // Q0
sO[ty][i * kBc + tx] = 0;
}
sMax[ty] = -INFINITY; // 行最大值 实时修正
sDenom[ty] = 0; // 每一行的分母 实时修正
// Outer loop over KV blocks
// 即M方向最大值 所以在一个block中循环即可
for (int j = 0; j < groupSeq; j++) { // KV的M方向循环(要反过来
// Load K and V
if ((j * kBc + tx) < seqlen) {
// 这个搬运与上面P矩阵搬运类似
for (int i = 0; i < groupTy; i++) { // KV的N方向循环
// j = 0:K0, j = 1: K1 ...
sK[tx][i * kBr + ty] = K[j * kBc * kDim + tx * kDim + i * kBr + ty];
// j = 0:V0, j = 1: V1 ...
sV[tx][i * kBr + ty] = V[j * kBc * kDim + tx * kDim + i * kBr + ty];
}
}
__syncthreads();
// Compute Q * K^T
Ty sum = 0.f;
for (int i = 0; i < kDim; i++) {
sum += sQ[ty][i] * sK[tx][i];
}
// 每一个thread都算一下
// 最终汇聚起来就是Q0*K0^T
sQK[ty][tx] = sum * smScale;
__syncthreads();
// Find max for numerical stability
// 寻找QK的行最大值进行softmax
// 每个thread,每个小块都自己找对应该行的最大值
Ty localMax = -INFINITY;
for (int i = 0; i < kBc; i++) {
localMax = max(localMax, sQK[ty][i]);
}
__syncthreads();
// 历史最大值 Q0K0 Q0K1 Q0K2中
Ty newMax = max(sMax[ty], localMax);
// Compute Exponentials
// 计算当前小方块的分子
sSafeE[ty][tx] = exp(sQK[ty][tx] - newMax);
__syncthreads();
// Compute Denominator
Ty localDenom = 0.f;
for (int i = 0; i < kBc; i++) {
// 计算当前小方块的分母(求和)
localDenom += sSafeE[ty][i];
}
__syncthreads();
// Update Output (Online Softmax)
// 分母修正用 乘在分母前
Ty rescaleOld = exp(sMax[ty] - newMax);
// 分母:旧数据贡献*修正 + 新数据贡献
Ty newDenom = sDenom[ty] * rescaleOld + localDenom;
// i控制v的列循环 也控制O的列循环
for (int i = 0; i < groupTx; i++) {
// 修正老的分子
sO[ty][i * kBc + tx] = (sO[ty][i * kBc + tx] * rescaleOld);
// 小方块内矩阵计算
for (int k = 0; k < kBc; k++) {
sO[ty][i * kBc + tx] += sSafeE[ty][k] * sV[k][i * kBc + tx];
}
}
// 更新QK矩阵的行最大值
sMax[ty] = newMax;
// 更新老分母
sDenom[ty] = newDenom;
__syncthreads();
}
// Write output to global memory
for (int i = 0; i < groupTx; i++) {
// 全局更新分母
O[row * kDim + i * kBc + tx] = sO[ty][i * kBc + tx] / sDenom[ty];
}
}
torch::Tensor flash_attention_v2_cuda(torch::Tensor q, torch::Tensor k,
torch::Tensor v) {
CHECK_INPUT(q);
CHECK_INPUT(k);
CHECK_INPUT(v);
// 1, 1, M, N
int bs = q.size(0);
int head = q.size(1);
int seqlen = q.size(2); // M
int dim = q.size(3); // N
float sm_scale = 1.f / sqrtf(static_cast<float>(dim));
int stride_head = seqlen * dim;
auto out = torch::zeros_like(q);
const int Br = 4;
const int Bc = 4;
int Gc = bs * head;
int Gr = (seqlen + Br - 1) / Br;
assert(dim % Bc == 0 && seqlen % Br == 0);
dim3 grid = dim3(Gc, Gr);
dim3 block = dim3(Bc, Br);
using scalar_t = float;
flash_attention_v2_kernel<scalar_t, Bc, Br, 128><<<grid, block>>>(
q.data_ptr<scalar_t>(), k.data_ptr<scalar_t>(), v.data_ptr<scalar_t>(),
out.data_ptr<scalar_t>(), seqlen, stride_head, sm_scale);
return out;
}简单的线代基础
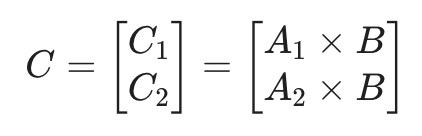
如果 A 矩阵再拆分为 2 个
 如果 B 矩阵再拆分为 2 个
如果 B 矩阵再拆分为 2 个
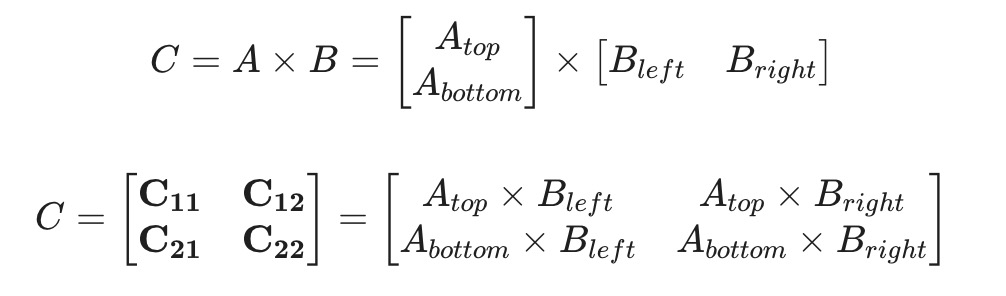
 如果 AB 都拆
如果 AB 都拆
self-attention 的公式
- 输入定义
输入矩阵为 :
- 序列长度:
- 嵌入维度:
- Attention 公式
线性变换:
- 参数说明
- : 输入矩阵的列数(即 )
- : 模型设计时的超参数“头数”(num_heads)
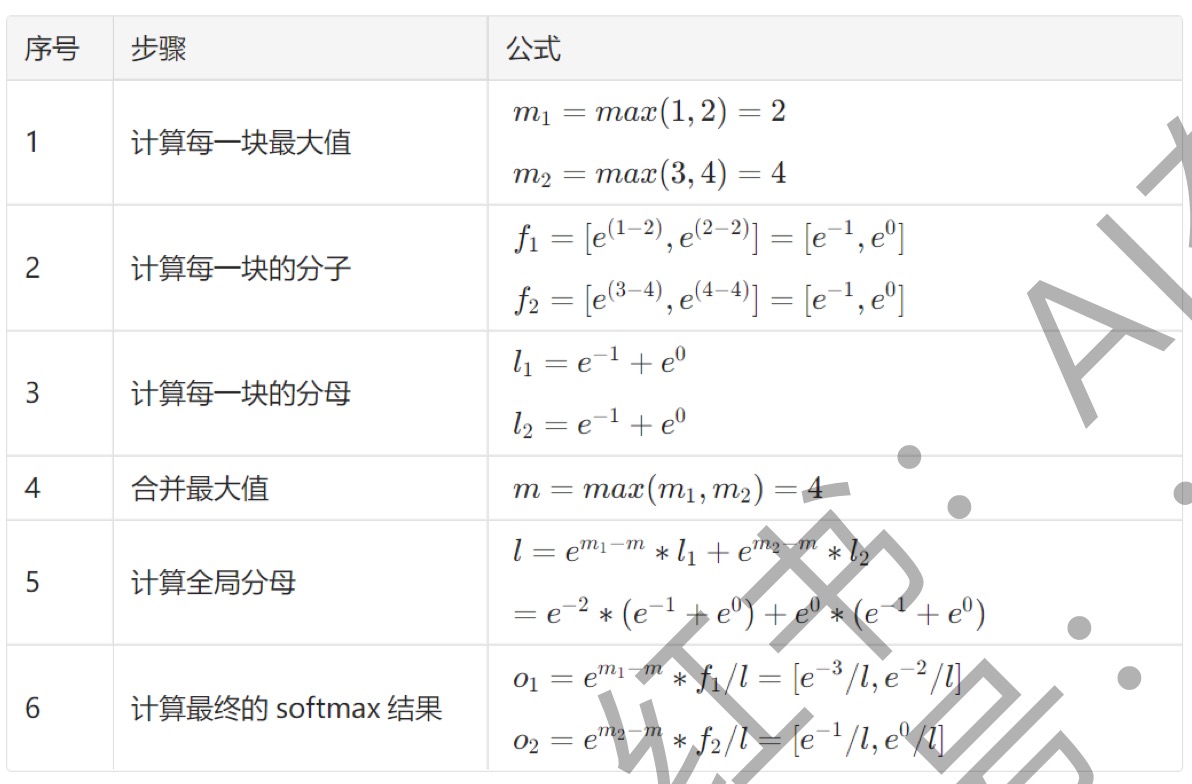
- Softmax 计算 (数值稳定性优化)
- : 表示每一行(输入向量)
- 分母: 表示对该行所有元素求和
- 分子: 表示当前元素经过数值稳定处理后的指数值
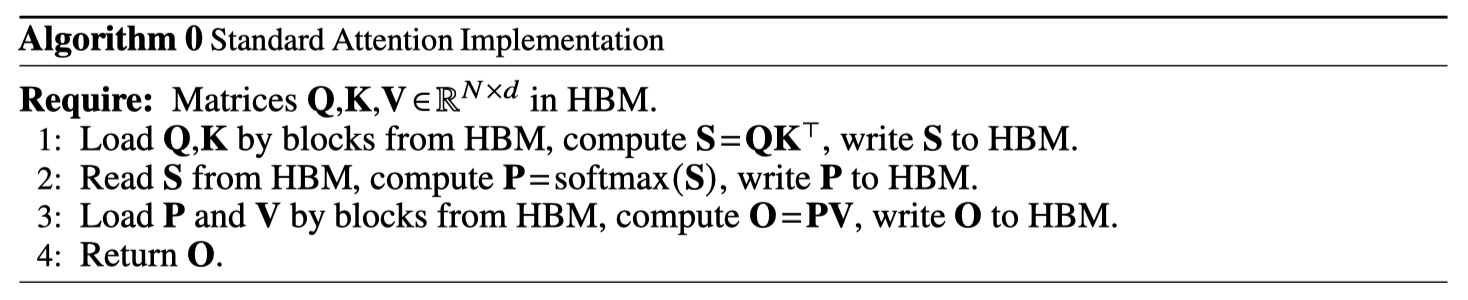
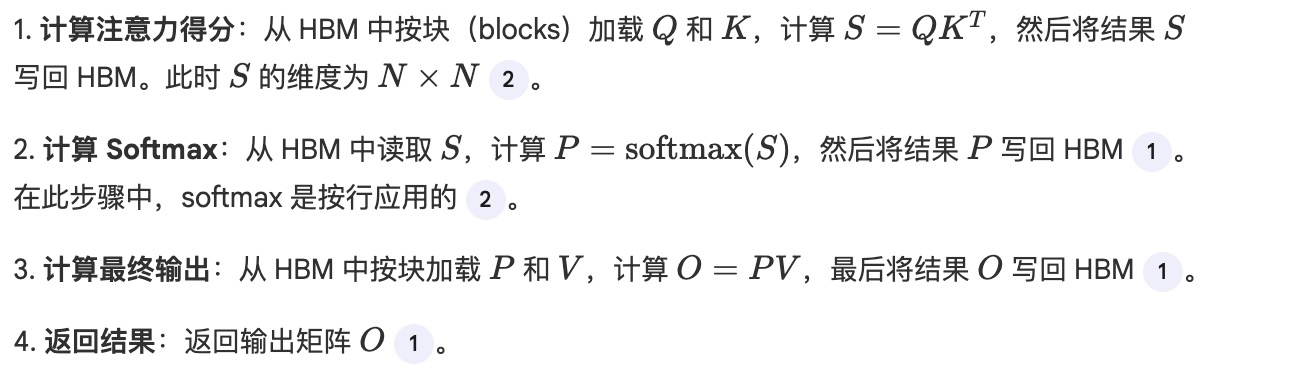
原始 self-attention 步骤
总结:简单的矩阵分块,一行一起 softmax 三次写入三次写出:1. QKt 写入写出,2. softmax 写入写出,3. PV 乘法写入写出
flash 版本的 self-attention 步骤
总结:矩阵分块计算,softmax 也基本是分块计算