__global__ void matMulNaive(float *A, float *B, float *C, int M, int N, int K) {
int row = blockIdx.y * blockDim.y + threadIdx.y;
int col = blockIdx.x * blockDim.x + threadIdx.x;
if (row < M && col < N) {
float sum = 0.0f;
for (int k = 0; k < K; ++k) {
// A 读取良好:连续
// B 读取糟糕:stride 为 N
sum += A[row * K + k] * B[k * N + col];
}
C[row * N + col] = sum;
}
}// 假设传入的 B_T 已经是 B 的转置矩阵,维度为 [N, K]
__global__ void matMulTransposed(float *A, float *B_T, float *C, int M, int N, int K) {
int row = blockIdx.y * blockDim.y + threadIdx.y;
int col = blockIdx.x * blockDim.x + threadIdx.x;
if (row < M && col < N) {
float sum = 0.0f;
for (int k = 0; k < K; ++k) {
// A 读取良好:连续
// B_T 读取良好:也是连续的!(col 变成了 B_T 的行索引)
sum += A[row * K + k] * B_T[col * K + k];
}
C[row * N + col] = sum;
}
}
总结:
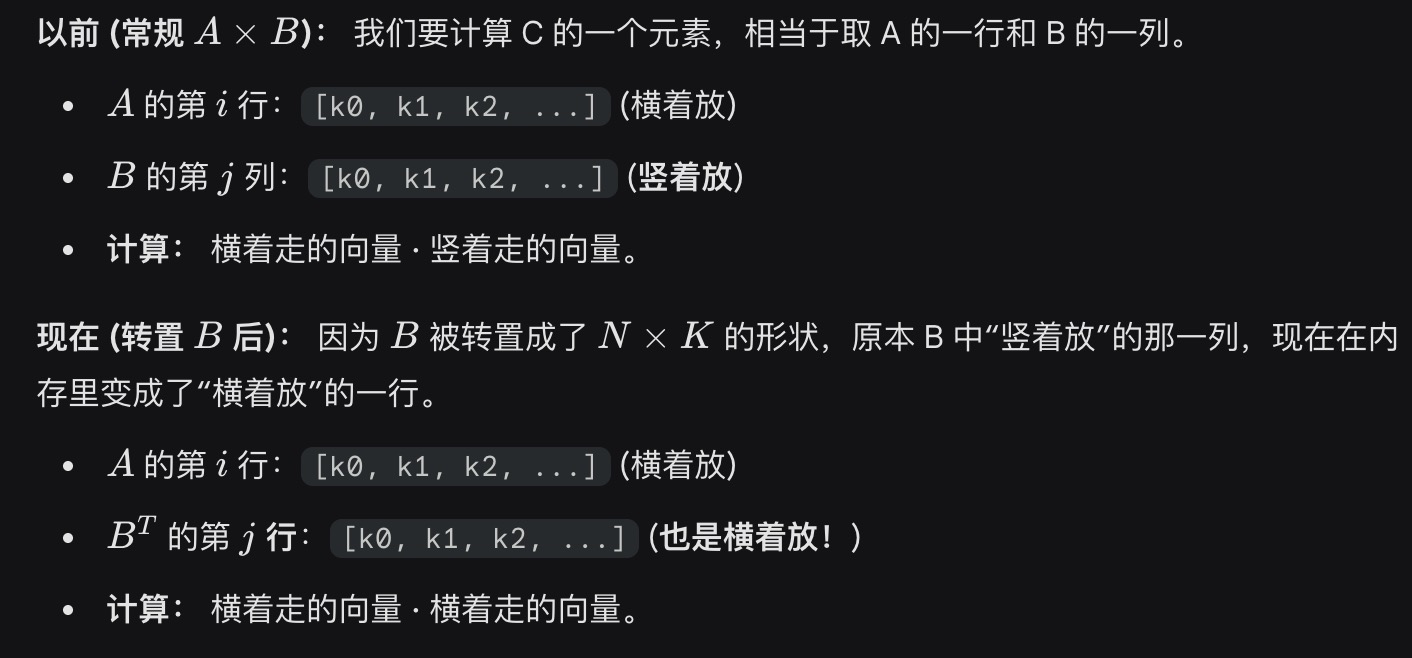
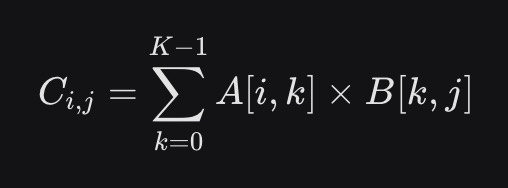
以前是MxK * KxN
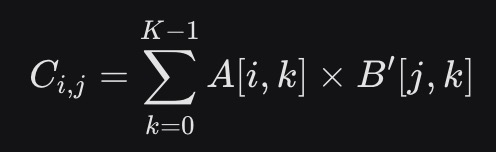
现在是MxK * (NxK)T,但其实本质是MxK*NxK,是B矩阵也是按照行索引
以前是col那一列:k * N + col
现在是col那一行:col*K + k
原始AB:
 新AB’
新AB’